
Hi all,
this is the first in a series of blogs outlining the design and operation of the Personal Particle Accelerator. Don’t forget to read the back-story. There’s also a list of experiments that are possible with the PPA too. Looking forward to your questions and comments!
** We’re flat out fulfilling the Kickstarter campaign right now, but you can sign up to find out when it’s available for sale post-Kickstarter ***
Personal Particle Accelerator – Principle of operation
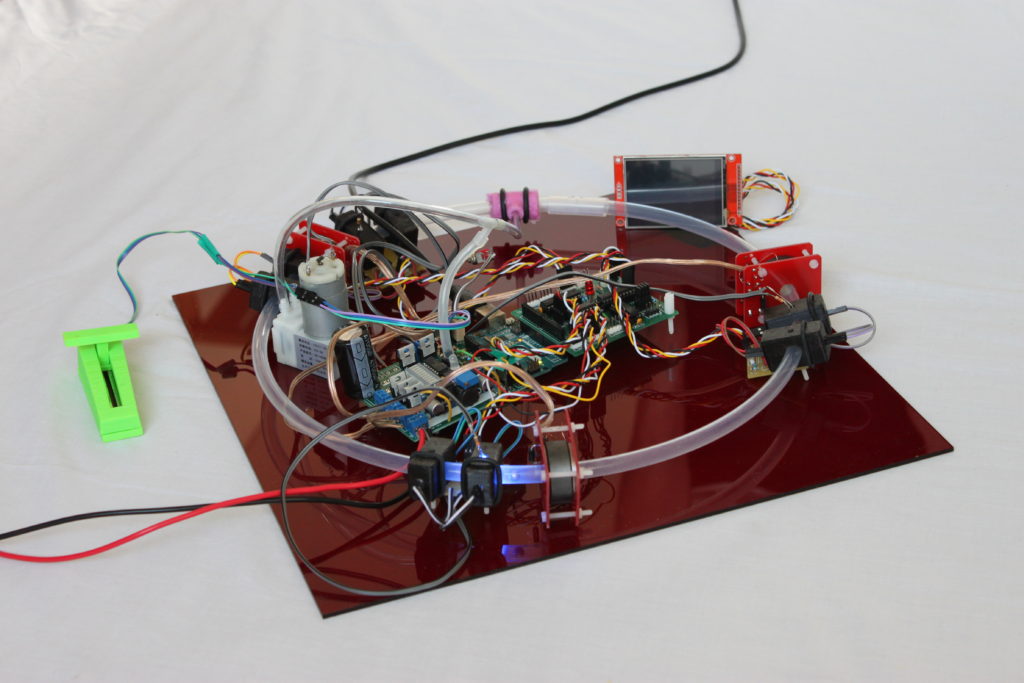
The overall design allows for a steel ball to be accelerated through a teflon tube by a magnetic field in each of three electromagnets. As of May 2017, it looks like this:
The PPA’s minimum power requirements are 12V DC, with current draw about 2 Amps, which can be supplied by a cheap laptop power supply. To ensure top performance, and provide opportunities for experimentation and optimisation, an ideal power supply would be a laboratory (variable) power supply covering the range 12-20V DC at 3 Amps. Do not supply more than 20V DC to the Personal Particle Accelerator. Protection against incorrect polarity is provided by means of a power diode on the Output board PCB.
The tube is laid out in a circle and the operation of the electromagnets is called a reluctance coil gun. Designing and building these devices straddle the ground between electrical engineers and physicists, and are a popular project for enthusiasts.
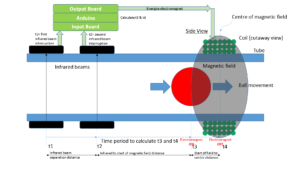
The critical performance factor is the timing of the electric pulses to the electromagnet, as too short a pulse will be a wasted opportunity to accelerate the ball, but too long a pulse will cause the ball to decelerate back towards the centre of the electromagnet.
The optimal electric pulse terminates as the ball reaches the centre of the electromagnet, however as there are no sensors to detect this state directly, the pulse timings must be optimised by experimentally varying the timing for each electromagnet. The dual photogate before each electromagnet provides the position/timing signals that allow position and velocity to be dynamically estimated, and hence the pulse start and end times. During tuning, another dual photogate is positioned after the electromagnet being tuned to assist in measuring the output speed of the ball, building the following performance curve:
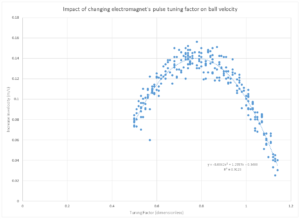
In the above graph, a tuning factor around 0.8 is optimal as it maximises the increase in velocity of the ball as it passes through the electromagnet. A simple definition of Tuning Factor is the ratio of the pulse duration relative to travel time to the electromagnet midpoint without power applied. It is controlled in the Arduino software.
The Personal Particle Accelerator differs from other hobbyist particle accelerators I’ve seen by:
- enclosing the ball in a tube – this allows a higher velocity as balls can jump out of a groove due to centripetal force. Furthermore, it provides the potential for establishing a vacuum, to reduce drag of the ball as it rotates.
- the control system is digital – this aids the optimisation of the control system and general flexibility.
- 12V design – this safe voltage level improves upon other designs that requires 110V or more to operate, often with large capacitors storing energy. This is possible due to a combination of efficient design of the electromagnet, but also the additional optimisation possible due to the digital control system.
Design goals
1 The system and its components must be safe
2 The components should be easy to assemble and disassemble – this will support experimentation, improvement and repair. Thus, no permanent bonds (eg. glue) are used. Also, through-hole components have been chosen in preference to SMD components.
3 The system should be as cost effective and fun to work with as possible
In future blogs I’ll cover the physics and engineering behind:
- The infra-red photogates sensors (IRPS) – these sensors are effectively particle detectors and supply the critical timing information to the input board.
- The input board – converts analogue timing information from the IRPS into clean digital signals that the Arduino can work with
- Arduino software design – the software design such that the humble Arduino microcontroller can expeditiously calculate critical timing values in real time
- The output board – uses the Arduino’s output signals to pulse the electromagnets
- The electromagnets – it all happens here ! Settling on the coil and its housing was a long task !
- Processing software design – here we manage the serial connection between Arduino and PC, and form graphs of PPA performance
- Comparing the LHC with the Personal Particle Accelerator – comparisons with the real deal
- 3D design – the tools and tricks I used to make the 3d printed parts a reality
- The Vacuum System – the parts and tricks behind reducing air drag in the tube
- High speed photography of the Personal Particle Accelerator – some good tips on photographing the ball in motion using a flash and DSLR camera
- Optimising (tuning) the PPA – in depth description of tuning the particle accelerator
- The LCD Display – the interface connection and Arduino software
- Operating Instructions – user instructions
- Producing the PPA – what I’ve learn along the way about getting into mass production
** Sign up to find out when you can purchase a DIY kit following our Kickstarter campaign ***
Quick video interview from the Bay Area Maker Faire 2017:
https://m.facebook.com/story.
Can you send an real life you tube video of the project, please. Keep up the good work.
Hi Ahmed,
just included a video in the main post above. There’s two more videos under https://awesometech1.wpengine.com/videos/
Cheers
Dan.
I’m planning on constructing one of these during the summer, and I was wondering if you would be so kind as to write step by step instructions for someone who has never made one of these marvellous devices. Thank you in advance,
Aydin
Hi Aydin, I’m working on the step-by-step instructions! You’ll be able to see them when I start the Kickstarter campaign. Please go to our expression of interest page so that you’re notified of the Kickstarter when it starts.
Cheers,
Daniel.
Next project: Counter-circulating rings and a collider section???
Beautiful project. Congratulations!! Best of luck with the Kickstarter campaign.