
Ok, so don’t go adjusting the stepsticks without a good reason! It really is the last step you should try if you’re having movement problems. So this page is written assuming you’ve already:
- read up on likely problems and their resolution at https://awesome.tech/mini-gerbil-debugging/
- reviewed each axis for mechanical obstructions (wires, anything mounted nearby, debris)
- checked the K40 belt(s) are the right tension – not to loose, not too tight. Belt tension can be adjusted via the access port which moves a tensioner.
Which axis is affected?
Watch the movement problem carefully and send various movement commands to determine if the problem is with X axis, Y axis or both. Only adjust the stepstick relevant to the affected axis.
Identifying the stepsticks
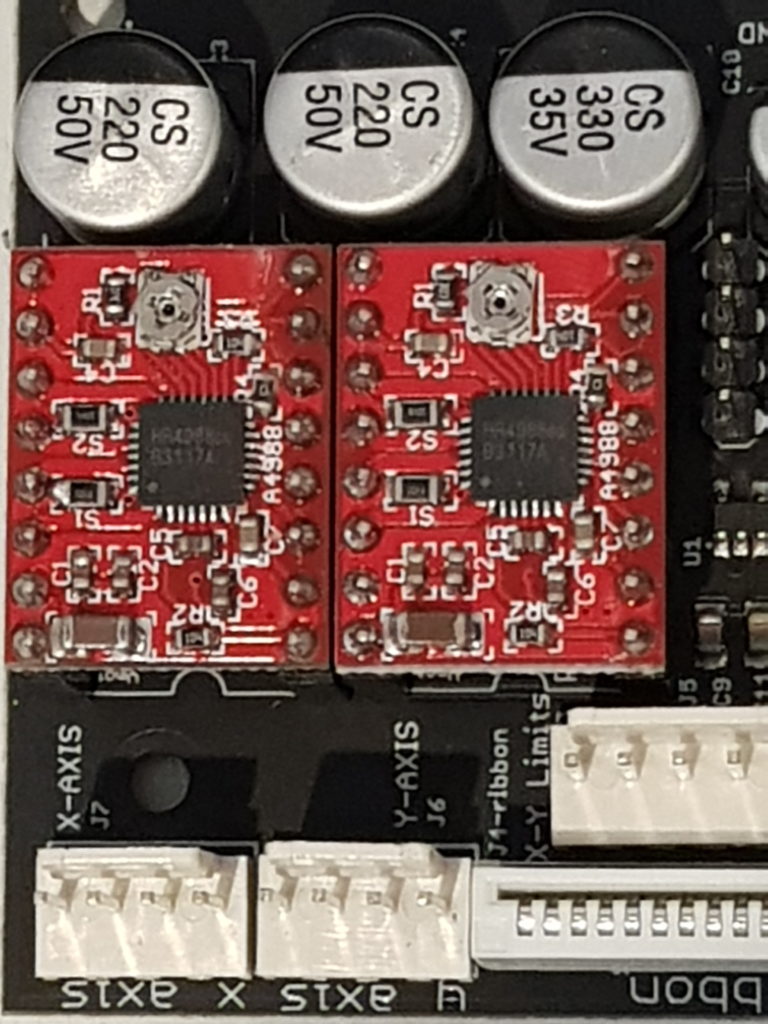
Adjusting the stepsticks
Ensure the power is off before adjusting.
The typical position of the current adjustment pots can be seen below, and are defined by an outward facing line perpendicular to the flat side of the pot.
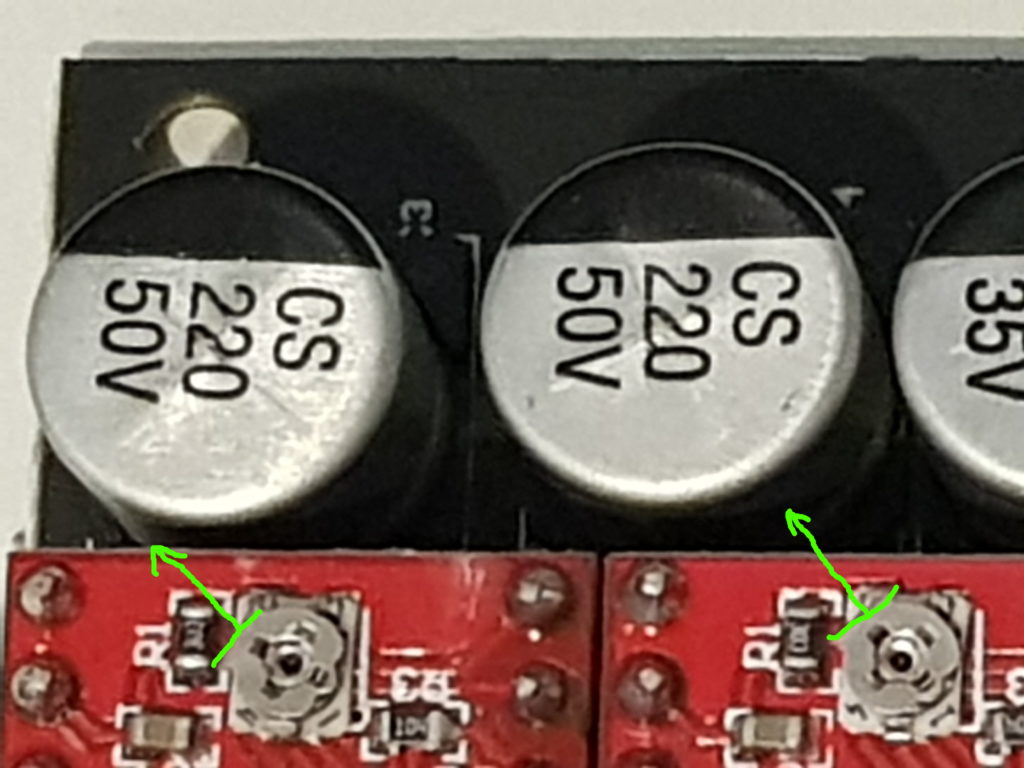
The potentiometer settings are tiny – use a small phillips or flat screwdriver between 1.4 and 2mm wide to adjust the relevant stepstick current. Please note:
- The setting is very sensitive, so only adjust a maximum of 15 degrees at a time.
- Turn clockwise to increase the current
After adjusting, turn on and see if your movement issue is resolved.
The Y axis stepstick needs a bit more current than the X axis… can you think why?
The Y axis motor must carry the weight of the Y axis and the X axis, whereas the X axis motor only drives the X axis.
Note: turning up the stepstick current too much might cause the step stick driver to perform a thermal shut down. This means that to protect itself from permanent damage, it stops operating until it cools down. Once it cools down, it will operate as usual. In this case reduce the belt tension if needed, and the step stick current.
Hi I purchased second hand a mg2 board and the stepper drivers are blown.
I have tried to setup the new ones but I am unable to get the correct voltage set
When I try to use the pictures above to the the adjustment voltages are unstable
Do you have any thoughts as to how to set ie set to lowest stable values
This would mean that the motors could draw nearly 1 amp
Thanks Jeff Rae